System Calls¶
Lecture objectives:¶
- Linux system calls implementation
- VDSO and virtual syscalls
- Accessing user space from system calls
Linux system calls implementation¶
At a high level system calls are "services" offered by the kernel to user applications and they resemble library APIs in that they are described as a function call with a name, parameters and return value.
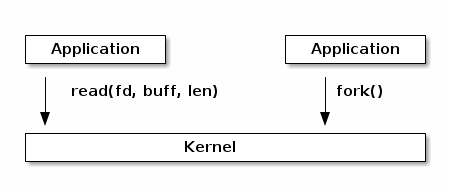
However, on a closer look, we can see that system calls are actually not function calls, but specific assembly instructions (architecture and kernel specific) that do the following:
- setup information to identify the system call and its parameters
- trigger a kernel mode switch
- retrieve the result of the system call
In Linux, system calls are identified by numbers and the parameters for system calls are machine word sized (32 or 64 bit). There can be a maximum of 6 system call parameters. Both the system call number and the parameters are stored in certain registers.
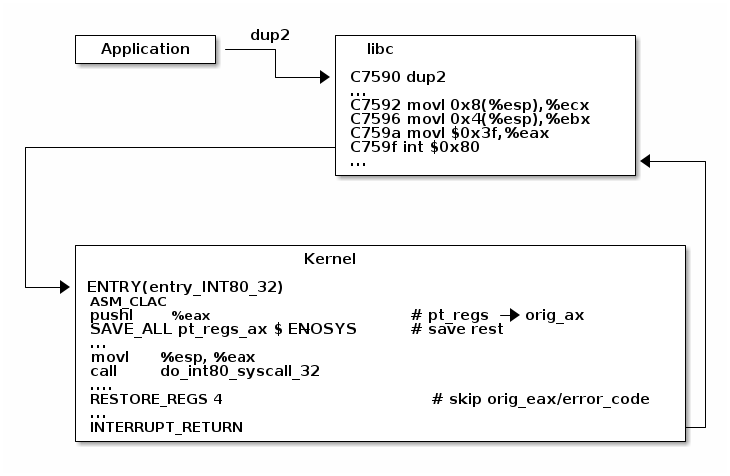
For example, on 32bit x86 architecture, the system call identifier is stored in the EAX register, while parameters in registers EBX, ECX, EDX, ESI, EDI, EBP.
System libraries (e.g. libc) offers functions that implement the actual system calls in order to make it easier for applications to use them.
When a user to kernel mode transition occurs, the execution flow is interrupted and it is transfered to a kernel entry point. This is similar with how interrupts and exception are handled (in fact on some architectures this transition happens as a result of an exception).
The system call entry point will save registers (which contains values from user space, including system call number and system call parameters) on stack and then it will continue with executing the system call dispatcher.
Note
During the user - kernel mode transition the stack is also switched from ther user stack to the kernel stack. This is explained in more details in the interrupts lecture.
The purpose of the system call dispatcher is to verify the system call number and run the kernel function associated with the system call.
/* Handles int $0x80 */
__visible void do_int80_syscall_32(struct pt_regs *regs)
{
enter_from_user_mode();
local_irq_enable();
do_syscall_32_irqs_on(regs);
}
/* simplified version of the Linux x86 32bit System Call Dispatcher */
static __always_inline void do_syscall_32_irqs_on(struct pt_regs *regs)
{
unsigned int nr = regs->orig_ax;
if (nr < IA32_NR_syscalls)
regs->ax = ia32_sys_call_table[nr](regs->bx, regs->cx,
regs->dx, regs->si,
regs->di, regs->bp);
syscall_return_slowpath(regs);
}
To demonstrate the system call flow we are going to use the virtual machine setup, attach gdb to a running kernel, add a breakpoint to the dup2 system call and inspect the state.
In summary, this is what happens during a system call:
- The application is setting up the system call number and parameters and it issues a trap instruction
- The execution mode switches from user to kernel; the CPU switches to a kernel stack; the user stack and the return address to user space is saved on the kernel stack
- The kernel entry point saves registers on the kernel stack
- The system call dispatcher identifies the system call function and runs it
- The user space registers are restored and execution is switched back to user (e.g. calling IRET)
- The user space application resumes
System call table¶
The system call table is what the system call dispatcher uses to map system call numbers to kernel functions:
#define __SYSCALL_I386(nr, sym, qual) [nr] = sym,
const sys_call_ptr_t ia32_sys_call_table[] = {
[0 ... __NR_syscall_compat_max] = &sys_ni_syscall,
#include <asm/syscalls_32.h>
};
__SYSCALL_I386(0, sys_restart_syscall, )
__SYSCALL_I386(1, sys_exit, )
#ifdef CONFIG_X86_32
__SYSCALL_I386(2, sys_fork, )
#else
__SYSCALL_I386(2, sys_fork, )
#endif
__SYSCALL_I386(3, sys_read, )
__SYSCALL_I386(4, sys_write, )
System call parameters handling¶
Handling system call parameters is tricky. Since these values are setup by user space, the kernel can not assume correctness and must always verify them throughly.
Pointers have a few important special cases that must be checked:
- Never allow pointers to kernel-space
- Check for invalid pointers
Since system calls are executed in kernel mode, they have access to kernel space and if pointers are not properly checked user applications might get read or write access to kernel space.
For example, lets consider the case where such a check is not made for the read or write system calls. If the user passes a kernel-space pointer to a write system call then it can get access to kernel data by later reading the file. If it passes a kernel-space pointer to a read system call then it can corrupt kernel memory.
Likewise, if a pointer passed by the application is invalid (e.g. unmapped, read-only for cases where it is used for writing), it could "crash" the kernel. There two approaches that could be used:
- Check the pointer against the user address space before using it, or
- Avoid checking the pointer and rely on the MMU to detect when the pointer is invalid and use the page fault handler to determine that the pointer was invalid
Although it sounds tempting, the second approach is not that easy to implement. The page fault handler uses the fault address (the address that was accessed), the faulting address (the address of the instruction that did the access) and information from the user address space to determine the cause:
- Copy on write, demand paging, swapping: both the fault and faulting addresses are in user space; the fault address is valid (checked against the user address space)
- Invalid pointer used in system call: the faulting address is in kernel space; the fault address is in user space and it is invalid
- Kernel bug (kernel accesses invalid pointer): same as above
But in the last two cases we don't have enough information to determine the cause of the fault.
In order to solve this issue Linux uses special APIs (e.g
copy_to_user()) to accesses user space that are specially
crafted:
- The exact instructions that access user space are recorded in a table (exception table)
- When a page fault occurs the faulting address is checked against this table
Although the fault handling case may be more costly overall depending on the address space vs exception table size, and it is more complex, it is optimized for the common case and that is why it is preferred and used in Linux.
| Cost | Pointer checks | Fault handling |
|---|---|---|
| Valid address | address space search | negligible |
| Invalid address | address space search | exception table search |
Accessing user space from system calls¶
As we mentioned earlier, user space must be accessed with special APIs
(get_user(), put_user(), copy_from_user(),
copy_to_user()) that check wether the pointer is in user space
and also handle the fault if the pointer is invalid. In case of invalid
pointers they return a non zero value.
/* OK: return -EFAULT if user_ptr is invalid */
if (copy_from_user(&kernel_buffer, user_ptr, size))
return -EFAULT;
/* NOK: only works if user_ptr is valid otherwise crashes kernel */
memcpy(&kernel_buffer, user_ptr, size);
Let's examine the simplest API, get_user, as implemented for x86:
#define get_user(x, ptr) \
({ \
int __ret_gu; \
register __inttype(*(ptr)) __val_gu asm("%"_ASM_DX); \
__chk_user_ptr(ptr); \
might_fault(); \
asm volatile("call __get_user_%P4" \
: "=a" (__ret_gu), "=r" (__val_gu), \
ASM_CALL_CONSTRAINT \
: "0" (ptr), "i" (sizeof(*(ptr)))); \
(x) = (__force __typeof__(*(ptr))) __val_gu; \
__builtin_expect(__ret_gu, 0); \
})
The implementation uses inline assembly, that allows inserting ASM sequences in C code and also handles access to / from variables in the ASM code.
Based on the type size of the x variable, one of __get_user_1, __get_user_2 or __get_user_4 will be called. Also, before executing the assembly call, ptr will be moved to the first register EAX while after the completion of assembly part the value of EAX will be moved to __ret_gu and the EDX register will be moved to __val_gu.
It is equivalent to the following pseudo code:
#define get_user(x, ptr) \
movl ptr, %eax \
call __get_user_1 \
movl %edx, x \
movl %eax, result \
The __get_user_1 implementation for x86 is the following:
.text
ENTRY(__get_user_1)
mov PER_CPU_VAR(current_task), %_ASM_DX
cmp TASK_addr_limit(%_ASM_DX),%_ASM_AX
jae bad_get_user
ASM_STAC
1: movzbl (%_ASM_AX),%edx
xor %eax,%eax
ASM_CLAC
ret
ENDPROC(__get_user_1)
bad_get_user:
xor %edx,%edx
mov $(-EFAULT),%_ASM_AX
ASM_CLAC
ret
END(bad_get_user)
_ASM_EXTABLE(1b,bad_get_user)
The first two statements check the pointer (which is stored in EDX) with the addr_limit field of the current task (process) descriptor to make sure that we don't have a pointer to kernel space.
Then, SMAP is disabled, to allow access to user from kernel, and the access to user space is done with the instruction at the 1: label. EAX is then zeroed to mark success, SMAP is enabled, and the call returns.
The movzbl instruction is the one that does the access to user space and its address is captured with the 1: label and stored in a special section:
/* Exception table entry */
# define _ASM_EXTABLE_HANDLE(from, to, handler) \
.pushsection "__ex_table","a" ; \
.balign 4 ; \
.long (from) - . ; \
.long (to) - . ; \
.long (handler) - . ; \
.popsection
# define _ASM_EXTABLE(from, to) \
_ASM_EXTABLE_HANDLE(from, to, ex_handler_default)
For each address that accesses user space we have an entry in the exception table, that is made up of: the faulting address(from), where to jump to in case of a fault, and a handler function (that implements the jump logic). All of these addresses are stored on 32bit in relative format to the exception table, so that they work for both 32 and 64 bit kernels.
All of the exception table entries are then collected in the __ex_table section by the linker script:
#define EXCEPTION_TABLE(align) \
. = ALIGN(align); \
__ex_table : AT(ADDR(__ex_table) - LOAD_OFFSET) { \
VMLINUX_SYMBOL(__start___ex_table) = .; \
KEEP(*(__ex_table)) \
VMLINUX_SYMBOL(__stop___ex_table) = .; \
}
The section is guarded with __start___ex_table and __stop___ex_table symbols, so that it is easy to find the data from C code. This table is accessed by the fault handler:
bool ex_handler_default(const struct exception_table_entry *fixup,
struct pt_regs *regs, int trapnr)
{
regs->ip = ex_fixup_addr(fixup);
return true;
}
int fixup_exception(struct pt_regs *regs, int trapnr)
{
const struct exception_table_entry *e;
ex_handler_t handler;
e = search_exception_tables(regs->ip);
if (!e)
return 0;
handler = ex_fixup_handler(e);
return handler(e, regs, trapnr);
}
All it does is to set the return address to the one in the to field of the exception table entry which, in case of the get_user exception table entry, is bad_get_user which return -EFAULT to the caller.