SO2 Lab 08 - File system drivers (Part 1)¶
Lab objectives¶
- acquiring knowledge about the Virtual Filesystem (VFS) in Linux and understanding concepts regarding 'inode', 'dentry', 'file', superblock and data block.
- understanding the process of mounting a file system inside VFS.
- knowledge regarding various file system types and understanding differences between file systems with physical support (on disk) and the ones without physical support.
Virtual Filesystem (VFS)¶
The Virtual Filesystem (also known as VFS) is a component of the kernel that handles all system calls related to files and file systems. VFS is a generic interface between the user and a particular file system. This abstraction simplifies the implementation of file systems and provides an easier integration of multiple file systems. This way, the implementation of a file system is accomplished by using the API provided by the VFS, and the generic hardware and I/O subsystem communication parts are handled by VFS.
From a functional point of view, file systems can be grouped into:
- disk file systems (ext3, ext4, xfs, fat, ntfs, etc.)
- network file systems (nfs, smbfs/cifs, ncp, etc.)
- virtual filesystems (procfs, sysfs, sockfs, pipefs, etc.)
A Linux kernel instance will use VFS for the hierarchy (a tree) of directories and files. A new file system will be added as a VFS subtree using the mount operation. A file system is usually mounted from the environment for which it was built (from a block type device, from network, etc.). In particular, however, the VFS can use a normal file as a virtual block device, so it is possible to mount disk file systems over normal files. This way, stacks of file systems can be created.
The basic idea of VFS is to provide a single file model that can represent files from any file system. The file system driver is responsible for bringing to the common denominator. This way the kernel can create a single directory structure that contains the entire system. There will be a file system that will be the root, the rest being mounted in its various directories.
The general file system model¶
The general file system model, to which any implemented file system needs to be reduced, consists of several well-defined entities: superblock, inode, file, and dentry.
These entities are file system metadata (they contain information about data or other metadata).
Model entities interact using some VFS or kernel subsystems: dentry cache, inode cache, buffer cache. Each entity is treated as an object: it has a associated data structure and a pointer to a table of methods. The induction of particular behavior for each component is done by replacing the associated methods.
superblock¶
The superblock stores the information needed for a mounted file system:
- inode and blocks locations
- file system block size
- maximum filename length
- maximum file size
- the location of the root inode
Localization:¶
- In the case of disk file systems, the superblock has a correspondent in the first block of the disk. (Filesystem Control Block).
- In VFS, all superblocks of filesystems are retained in a list of structures of type
struct super_blockand the methods in structures of typestruct super_operations.
inode¶
The inode (index node) keeps information about a file in the general sense (abstraction): regular file, directory, special file (pipe, fifo), block device, character device, link, or anything that can be abstracted as a file.
An inode stores information like:
- file type;
- file size;
- access rights;
- access or modify time;
- location of data on the disk (pointers to disk blocks containing data).
Note
Usually, the inode does not contain the file name. The name is stored by the dentry entity. This way, an inode can have multiple names (hardlinks).
Localization:¶
Like the superblock, the inode has a disk correspondent.
The inodes on disk are generally grouped into a specialized area (inode area) separated from the data blocks area; In some file systems, the equivalents of the inodes are spread in the file system structure (FAT);
As a VFS entity, an inode is represented by the structure struct inode and by the operations with it defined in the structure struct inode_operations.
Each inode is generally identified by a number. On Linux, the -i argument of the ls command shows the inode number associated with each file:
razvan@valhalla:~/school/so2/wiki$ ls -i
1277956 lab10.wiki 1277962 lab9.wikibak 1277964 replace_lxr.sh
1277954 lab9.wiki 1277958 link.txt 1277955 homework.wiki
file¶
File is the component of the file system model that is closest to the user. The structure exists only as a VFS entity in memory and has no physical correspondent on disk.
While the inode abstracts a file on the disk, the file structure abstracts an open file. From the point of view of the process, the file entity abstracts the file. From the point of view of the file system implementation, however, the inode is the entity that abstracts the file.
The file structure maintains information such as:
- file cursor position;
- file opening rights;
- pointer to the associated inode (eventually its index).
Localization:¶
- The structure
struct fileis the associated VFS entity, and the structurestruct file_operationsrepresents the operations associated with it.
dentry¶
The dentry (directory entry) associates an inode with a file name.
Generally, a dentry structure contains two fields:
- an integer that identifies the inode;
- a string representing its name.
The dentry is a specific part of a path that can be a directory or a file. For example, for the path /bin/vi, dentry objects will be created for /, bin, and vi (a total of 3 dentry objects).
- the dentry has a correspondent on the disk, but the correspondence is not direct because each file system keeps the dentries in a specific way
- in VFS, the dentry entity is represented by the structure
struct dentryand the operations with it are defined in thestruct dentry_operationsstructure.
Register and unregister filesystems¶
In the current version, the Linux kernel supports about 50 file systems, including:
- ext2/ ext4
- reiserfs
- xfs
- fat
- ntfs
- iso9660
- udf for CDs and DVDs
- hpfs
On a single system, however, it is unlikely that there will be more than 5-6 file systems. For this reason, file systems (or, more correctly, file system types) are implemented as modules and can be loaded or unloaded at any time.
In order to be able to dynamically load / unload a file system module, a file system registration / deregistration API is required. The structure describing a particular file system is struct file_system_type:
#include <linux/fs.h> struct file_system_type { const char *name; int fs_flags; struct dentry *(*mount) (struct file_system_type *, int, const char *, void *); void (*kill_sb) (struct super_block *); struct module *owner; struct file_system_type * next; struct hlist_head fs_supers; struct lock_class_key s_lock_key; struct lock_class_key s_umount_key; //... };
nameis a string representing the name that will identify a file system (the argument passed tomount -t).ownerisTHIS_MODULEfor file systems implemented in modules, andNULLif they are written directly into the kernel.- The
mountfunction reads the superblock from the disk in memory when loading the file system. The function is unique to each file system.- The
kill_sbfunction releases the super-block from memory.fs_flagsspecifies the flags with which the file system must be mounted. An example of such flag isFS_REQUIRES_DEVthat specifies to VFS that the file system needs a disk (it is not a virtual file system).fs_supersis a list containing all the superblocks associated with this file system. Since the same file system can be mounted multiple times, there will be a separate superblock for each mount.
The registration of a file system into the kernel is generally performed in the module initialization function. For registration, the programmer will have to
- initialize a structure of type
struct file_system_typewith the name, the flags, the function that implements the superblock reading operation and the reference to the structure that identifies the current module- call the
register_filesystem()function.
When unloading the module, you must unregister the file system by calling the unregister_filesystem() function.
An example of registering a virtual file system is found in the code for ramfs:
static struct file_system_type ramfs_fs_type = {
.name = "ramfs",
.mount = ramfs_mount,
.kill_sb = ramfs_kill_sb,
.fs_flags = FS_USERNS_MOUNT,
};
static int __init init_ramfs_fs(void)
{
if (test_and_set_bit(0, &once))
return 0;
return register_filesystem(&ramfs_fs_type);
}
Functions mount, kill_sb¶
When mounting the file system, the kernel calls the mount function defined within the structure file_system_type. The function makes a set of initializations and returns a dentry (the structure struct dentry) that represents the mount point directory. Usually mount() is a simple function that calls one of the functions:
mount_bdev(), which mounts a file system stored on a block devicemount_single(), which mounts a file system that shares an instance between all mount operationsmount_nodev(), which mounts a file system that is not on a physical devicemount_pseudo(), a helper function for pseudo-file systems (sockfs,pipefs, generally file systems that can not be mounted)
These functions get as parameter a pointer to a function fill_super() that will be called after the superblock initialization to finish its initialization by the driver. An example of such a function can be found in the fill_super section.
When unmounting the file system, the kernel calls kill_sb(), which performs cleanup operations and invokes one of the functions:
kill_block_super(), which unmounts a file system on a block devicekill_anon_super(), which unmounts a virtual file system (information is generated when requested)kill_litter_super(), which unmounts a file system that is not on a physical device (the information is kept in memory)
An example for a file system without disk support is the ramfs_mount() function in the ramfs file system:
struct dentry *ramfs_mount(struct file_system_type *fs_type,
int flags, const char *dev_name, void *data)
{
return mount_nodev(fs_type, flags, data, ramfs_fill_super);
}
An example for a file system from disk is the minix_mount() function in the minix file system:
struct dentry *minix_mount(struct file_system_type *fs_type,
int flags, const char *dev_name, void *data)
{
return mount_bdev(fs_type, flags, dev_name, data, minix_fill_super);
}
Superblock in VFS¶
The superblock exists both as a physical entity (entity on disk) and as a VFS entity (within the struct super_block structure).
The superblock contains only metainformation and is used to write and read metadata from the disk (inodes, directory entries).
A superblock (and implicitly the struct super_block structure) will contain information about the block device used, the list of inodes, a pointer to the inode of the file system root directory, and a pointer to the superblock operations.
The struct super_block structure¶
Part of the struct super_block structure definition is presented below:
struct super_block {
//...
dev_t s_dev; /* identifier */
unsigned char s_blocksize_bits; /* block size in bits */
unsigned long s_blocksize; /* block size in bytes */
unsigned char s_dirt; /* dirty flag */
loff_t s_maxbytes; /* max file size */
struct file_system_type *s_type; /* filesystem type */
struct super_operations *s_op; /* superblock methods */
//...
unsigned long s_flags; /* mount flags */
unsigned long s_magic; /* filesystem’s magic number */
struct dentry *s_root; /* directory mount point */
//...
char s_id[32]; /* informational name */
void *s_fs_info; /* filesystem private info */
};
- The superblock stores global information for an instance of a file system:
- the physical device on which it resides
- block size
- the maximum size of a file
- file system type
- the operations it supports
- magic number (identifies the file system)
- the root directory
dentry
Additionally, a generic pointer (void *) stores the private data of the file system.
The superblock can be viewed as an abstract object to which its own data is added when there is a concrete implementation.
Superblock operations¶
The superblock operations are described by the struct super_operations structure:
struct super_operations {
//...
int (*write_inode) (struct inode *, struct writeback_control *wbc);
struct inode *(*alloc_inode)(struct super_block *sb);
void (*destroy_inode)(struct inode *);
void (*put_super) (struct super_block *);
int (*statfs) (struct dentry *, struct kstatfs *);
int (*remount_fs) (struct super_block *, int *, char *);
//...
};
The fields of the structure are function pointers with the following meanings:
write_inode,alloc_inode,destroy_inodewrite, allocate, respectively release resources associated with an inode and are described in the next labput_superis called when the superblock is released atumount; within this function, any resources (generally memory) from the file system's private data must be released;remount_fsis called when the kernel detects a remount attempt (mount flagMS_REMOUNTM); most of the time here must be detected if a switch from read-only to read-write or vice versa is attempted; this can be done simply because both the old flags (insb->s_flags) and the new flags (theflagsargument) can be accessed;datais a pointer to the data sent bymount()that represent file system specific options;statfsis called when astatfssystem call is done (trystat –fordf); this call must fill the fields of thestruct kstatfsstructure, as it is done, for example, in theext4_statfs()function.
The fill_super() function¶
As specified, the fill_super() function is called to terminate the superblock initialization. This initialization involves filling the struct super_block structure fields and the initialization of the root directory inode.
An example of implementation is the ramfs_fill_super() function which is called to initialize the remaining fields in the superblock:
#include <linux/pagemap.h>
#define RAMFS_MAGIC 0x858458f6
static const struct super_operations ramfs_ops = {
.statfs = simple_statfs,
.drop_inode = generic_delete_inode,
.show_options = ramfs_show_options,
};
static int ramfs_fill_super(struct super_block *sb, void *data, int silent)
{
struct ramfs_fs_info *fsi;
struct inode *inode;
int err;
save_mount_options(sb, data);
fsi = kzalloc(sizeof(struct ramfs_fs_info), GFP_KERNEL);
sb->s_fs_info = fsi;
if (!fsi)
return -ENOMEM;
err = ramfs_parse_options(data, &fsi->mount_opts);
if (err)
return err;
sb->s_maxbytes = MAX_LFS_FILESIZE;
sb->s_blocksize = PAGE_SIZE;
sb->s_blocksize_bits = PAGE_SHIFT;
sb->s_magic = RAMFS_MAGIC;
sb->s_op = &ramfs_ops;
sb->s_time_gran = 1;
inode = ramfs_get_inode(sb, NULL, S_IFDIR | fsi->mount_opts.mode, 0);
sb->s_root = d_make_root(inode);
if (!sb->s_root)
return -ENOMEM;
return 0;
}
The kernel provides generic function to implement operations with file system structures.
The generic_delete_inode() and simple_statfs() functions used in the above code are such functions and can be used to implement the drivers if their functionality is sufficient.
The ramfs_fill_super() function in the above code fills some fields in the superblock, then reads the root inode and allocates the root dentry.
Reading the root inode is done in the ramfs_get_inode() function, and consists of allocating a new inode using new_inode() and initializing it. In order to free the inode, iput() is used, and d_make_root() is used to allocate the root dentry.
An example implementation for a disk file system is the minix_fill_super() function in the minix file system.
The functionality for the disk file system is similar to that of the virtual file system, with the exception of using the buffer cache.
Also, the minix file system keeps private data using the struct minix_sb_info structure.
A large part of this function deals with the initialization of these private data.
The private data is allocated using the kzalloc() function and stored in the s_fs_info field of the superblock structure.
VFS functions typically get as arguments the superblock, an inode and/or a dentry that contain a pointer to the superblock so that these private data can be easily accessed.
Buffer cache¶
Buffer cache is a kernel subsystem that handles caching (both read and write) blocks from block devices.
The base entity used by buffer cache is the struct buffer_head structure.
The most important fields in this structure are:
b_data, pointer to a memory area where the data was read from or where the data must be written tob_size, buffer sizeb_bdev, the block deviceb_blocknr, the number of block on the device that has been loaded or needs to be saved on the diskb_state, the status of the buffer
There are some important functions that work with these structures:
__bread(): reads a block with the given number and given size in abuffer_headstructure; in case of success returns a pointer to thebuffer_headstructure, otherwise it returnsNULL;sb_bread(): does the same thing as the previous function, but the size of the read block is taken from the superblock, as well as the device from which the read is done;mark_buffer_dirty(): marks the buffer as dirty (sets theBH_Dirtybit); the buffer will be written to the disk at a later time (from time to time thebdflushkernel thread wakes up and writes the buffers to disk);brelse(): frees up the memory used by the buffer, after it has previously written the buffer on disk if needed;map_bh(): associates the buffer-head with the corresponding sector.
Functions and useful macros¶
The super block typically contains a map of occupied blocks (by inodes, dentries, data) in the form of a bitmap (vector of bits). To work with such maps, it is recommend to use the following features:
find_first_zero_bit(), to find the first zero bit in a memory area. The size parameter means the number of bits in the search area;test_and_set_bit(), to set a bit and get the old value;test_and_clear_bit(), to delete a bit and get the old value;test_and_change_bit(), to invert the value of a bit and get the old value.
The following macrodefinitions can be used to verify the type of an inode:
S_ISDIR(inode->i_mode) to check if the inode is a directory;S_ISREG(inode->i_mode) to check if the inode is a regular file (not a link or device file).
Further reading¶
- Robert Love -- Linux Kernel Development, Second Edition -- Chapter 12. The Virtual Filesystem
- Understanding the Linux Kernel, 3rd edition - Chapter 12. The Virtual Filesystem
- Linux Virtual File System (presentation)
- Understanding Unix/Linux Filesystem
- Creating Linux virtual filesystems
- The Linux Documentation Project - VFS
- The "Virtual File System" in Linux
- A Linux Filesystem Tutorial
- The Linux Virtual File System
- Documentation/filesystems/vfs.txt
- File systems sources
Exercises¶
Important
To solve exercises, you need to perform these steps:
- prepare skeletons from templates
- build modules
- copy modules to the VM
- start the VM and test the module in the VM.
The current lab name is filesystems. See the exercises for the task name.
The skeleton code is generated from full source examples located in
tools/labs/templates. To solve the tasks, start by generating
the skeleton code for a complete lab:
tools/labs $ make clean
tools/labs $ LABS=<lab name> make skels
You can also generate the skeleton for a single task, using
tools/labs $ LABS=<lab name>/<task name> make skels
Once the skeleton drivers are generated, build the source:
tools/labs $ make build
Then, copy the modules and start the VM:
tools/labs $ make copy
tools/labs $ make boot
The modules are placed in /home/root/skels/filesystems/<task_name>.
Alternatively, we can copy files via scp, in order to avoid restarting the VM. For additional details about connecting to the VM via the network, please check Connecting to the Virtual Machine.
Review the Exercises section for more detailed information.
Warning
Before starting the exercises or generating the skeletons, please run git pull inside the Linux repo, to make sure you have the latest version of the exercises.
If you have local changes, the pull command will fail. Check for local changes using git status.
If you want to keep them, run git stash before pull and git stash pop after.
To discard the changes, run git reset --hard master.
If you already generated the skeleton before git pull you will need to generate it again.
Important
In order to have a better understanding of what we do well and we can do better, what factors affect your implication in teaching, extracurricular but also professional activities, we ask you to complete this survey. The survey is a short one, having answers with check marks, with an estimated completion time of 3-5 minutes. Obviously, we will send you the analysis of the survey and use it to improve the teaching activities.
myfs¶
To begin, we plan to get familiar with the interface exposed by the Linux kernel and the Virtual File System (VFS) component. That is why, for the beginning, we will work with a simple, virtual file system (i.e. without physical disk support). The file system is called myfs.
For this we will access the myfs/ subdirectory in the laboratory skeleton. We will implement the superblock operations within this lab, and the next lab will continue with the inode operations.
1. Register and unregister the myfs file system¶
The first step in working with the file system is to register and unregister it. We want to do this for the file system described in myfs.c. Check the file contents and follow the directions marked with TODO 1.
The steps you need to take are described in the section Register and unregister filesystems. Use the "myfs" string for the file system name.
Note
Within the file system structure, use the myfs_mount function present in the code skeleton to fill the superblock (done when mounting). In myfs_mount call the function specific to a file system without disk support. As an argument for the specific mount function, use the function of type fill_super defined in the code skeleton. You can review the Functions mount, kill_sb section.
To destroy the superblock (done at unmounting) use kill_litter_super, also a function specific to a file system without disk support. The function is already implemented, you need to fill it in the struct file_system_type structure.
After completing the sections marked with TODO 1 , compile the module, copy it to the QEMU virtual machine, and start the virtual machine. Load the kernel module and then check the presence of the myfs file system within the /proc/filesystems file.
At the moment, the file system is only registered, it does not expose operations to use it. If we try to mount it, the operation will fail. To try mounting, we create mount point /mnt/myfs/.
# mkdir -p /mnt/myfs
and then we use the mount command:
# mount -t myfs none /mnt/myfs
The error message we get shows that we have not implemented the operations that work on the superblock. We will have to implement the operations on the superblock and initialize the root inode. We will do this further.
Note
The none argument sent to the mount command indicates that we do not have a device from which to mount, the file system being a virtual one. Similarly, this is how the procfs or sysfs filesystems are mounted on Linux systems.
2. Completing myfs superblock¶
To be able to mount the file system, we need to fill its superblock's fields, that is, a generic VFS structure of type struct super_block.
We will fill out the structure within the myfs_fill_super() function; the superblock is represented by the variable sb passed as an argument to the function.
Follow the hints marked with TODO 2.
Note
To fill the myfs_fill_super function, you can start from the example in the section The fill_super() function.
For the superblock structure fields, use the macros defined within the code skeleton wherever possible.
The s_op field in the superblock structure must be initialized to the superblock operations structures (type struct super_operations). You need to define such a structure.
For information on defining the struct super_operations structure and filling the superblock, see the section Superblock operations.
Note
Initialize the drop_inode and statfs fields of struct super_operations structure.
Although the superblock will be properly initialized at this time, the mount operation will continue to fail. In order for the operation to be successfully completed, the root inode will have to be initialized, which we will do for the next exercise.
3. Initialize myfs root inode¶
The root inode is the inode of the file system root directory (i.e. /).
Initialization is done when the file system is mounted.
The myfs_fill_super function, called at mount, is the one that calls the myfs_get_inode function that creates and initializes an inode.
Typically, this function is used to create and initialize all inodes; In this exercise, however, we will only create the root inode.
The inode is allocated inside the myfs_get_inode function (local variable inode, allocated using the new_inode() function call).
To successfully complete mounting the file system, you will need to fill the myfs_get_inode function. Follow directions marked with TODO 3. A starting point is the ramfs_get_inode function.
Note
To initialize uid, gid and mode , you can use the inode_init_owner() function as it is used in ramfs_get_inode().
When you call inode_init_owner(), use NULL as the second parameter because there is no parent directory for the created inode.
Initialize the i_atime, i_ctime, and i_mtime of the VFS inode to the value returned by the current_time() function.
You will need to initialize the operations for the inode of type directory. To do this, follow the steps:
- Check if this is a directory type inode using the
S_ISDIRmacro.- For the
i_opandi_fopfields, use kernel functions that are already implemented:
- for
i_op:simple_dir_inode_operations.- for
i_fop:simple_dir_operations- Increase the number of links for the directory using the
inc_nlink()function.
4. Test myfs mount and unmount¶
Now we can mount the filesystem.
Follow the steps above to compile the kernel module, copy to the virtual machine, and start the virtual machine, then insert the kernel module, create the mount point /mnt/myfs/, and mount the file system.
We verify that the file system was mounted by inspecting the /proc/mounts file.
What inode number does the /mnt/myfs directory have? Why?
Note
To display the inode number of a directory, use the command:
ls -di /path/to/directory
where /path/to/directory/ is the path to the directory whose inode number we want to display.
We check myfs file system statistics using the following command:
stat -f /mnt/myfs
We want to see what the mount point /mnt/myfs contains and if we can create files.
For this we run the commands:
# ls -la /mnt/myfs
# touch /mnt/myfs/a.txt
We can see that we can not create the a.txt file on the file system.
This is because we have not implemented the operations to work with inodes in the struct super_operations structure.
We will implement these operations within the next lab.
Unmount the file system using the command
umount /mnt/myfs
Unload the kernel module corresponding to the file system as well.
Note
To test the entire functionality, you can use the test-myfs.sh script:
./test-myfs.sh
The script is copied to the virtual machine using make copy only if it is executable:
student@workstation:~/linux/tools/labs$ chmod +x skels/filesystems/myfs/test-myfs.sh
Note
The statistics displayed for the file system are minimal because the information is provided by the simple_statfs function.
minfs¶
Next, we will implement the basics of a very simple file system, called minfs, with disk support.
We will use a disk in the virtual machine that we will format and mount with the minfs filesystem.
For this we will access the minfs/kernel directory from the laboratory skeleton and work with the code in minfs.c.
Just like myfs we will not implement the operations for working with inodes. We will just limit to working with the superblock and, therefore, mounting.
The rest of the operations will be implemented in the next lab.
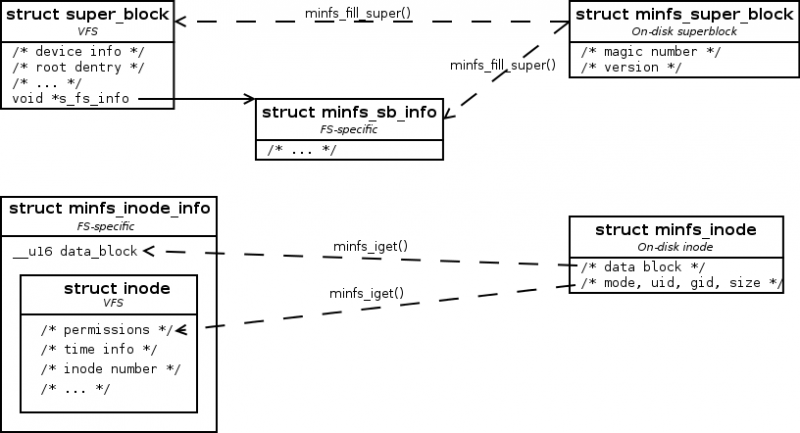
Follow the diagram below to clarify the role of structures within the minfs file system.
1. Registering and unregistering the minfs file system¶
Note
Before solving the exercise, we need to add a disk to the virtual machine. To do this, generate a file that we will use as the disk image using the following command:
dd if=/dev/zero of=mydisk.img bs=1M count=100
and add the -drive file=mydisk.img,if=virtio,format=raw argument to the qemu command in qemu/Makefile (in the QEMU_OPTS variable).
The new argument for the qemu command must be added after the one for the existing disk (YOCTO_IMAGE).
To register and unregister the file system, you will need to fill the minfs_fs_type and minfs_mount functions in minfs.c. Follow the directions marked with TODO 1.
Note
In the file system structure, for mount, use the minfs_mount function from in the code skeleton.
In this function, call the function to mount a file system with disk support (See the Functions mount, kill_sb section. Use mount_bdev()).
Choose the most suitable function for destroying the superblock (done at unmount); keep in mind that it is a file system with disk support. Use the kill_block_super() function.
Initialize the fs_flags field of the minfs_fs_type structure with the appropriate value for a file system with disk support. See the section Register and unregister filesystems.
The function for filling the superblock is minfs_fill_super.
After completing the sections marked with TODO 1, compile the module, copy it into the QEMU virtual machine, and start the virtual machine.
Load the kernel module and then check the presence of the minfs file system within the /proc/filesystems file.
To test the mounting of the minfs file system we will need to format the disk with its structure. Formatting requires the mkfs.minfs formatting tool from the minfs/user directory. The utility is automatically compiled when running make build and copied to the virtual machine at make copy.
After compiling, copying, and starting the virtual machine, format the /dev/vdd using the formatting utility:
# ./mkfs.minfs /dev/vdd
Load the kernel module:
# insmod minfs.ko
Create mount point /mnt/minfs/:
# mkdir -p /mnt/minfs/
and mount the filesystem
# mount -t minfs /dev/vdd /mnt/minfs/
The operation fails because the root inode is not initialized.
2. Completing minfs superblock¶
To be able to mount the file system, you will need to fill the superblock (i.e a structure with type struct super_block) within the minfs_fill_super function; it is the s argument of the function.
The structure of operations on the superblock is already defined: minfs_ops.
Follow the directions marked with TODO 2. You can also follow the implementation of the minix_fill_super function.
Note
Some structures are found in the header file minfs.h.
For information on working with buffers, go to the Buffer cache section.
Read the first block on the disk (block with index 0).
To read the block, use the sb_bread() function.
Cast the read data (the b_data field in the struct buffer_head structure) to the structure storing the minfs superblock information on the disk: struct minfs_super_block, defined in the source code file.
Structure struct minfs_super_block holds file system-specific information that is not found in the struct super_block generic structure (in this case only version).
Those additional information (found in struct minfs_super_block (on disk) but not in struct super_block (VFS)) will be stored in the struct minfs_sb_info structure.
To check the functionality, we need a function for reading the root inode.
For the time being, use the myfs_get_inode function from myfs file system exercises.
Copy the function into the source code and call it the same as you did for myfs.
The third argument when calling the myfs_get_inode function is the inode creation permissions, similar to the virtual file system exercise (myfs).
Validate the implementation by executing the commands from the previous exercise.
3. Creating and destroying minfs inodes¶
For mounting, we need to initialize the root inode, and to get the root inode, we need to implement the functions to work with inodes.
That is, you need to implement the minfs_alloc_inode and minfs_destroy_inode functions.
Follow the directions marked with TODO 3. You can use the minix_alloc_inode() and minix_destroy_inode() functions as a model.
For the implementation, look at the macros and structures in the minfs.h header file.
Note
For memory allocation/deallocation in minfs_alloc_inode and minfs_destroy_inode, we recommend using kzalloc() and kfree().
In minfs_alloc_inode allocate structures with type struct minfs_inode_info, but only return structures with type struct inode, i.e. return those given by the vfs_inode field.
In the minfs_alloc_inode function, call inode_init_once() to initialize the inode.
In the destroy_inode function, you can access the structure with type struct minfs_inode_info using the container_of macro.
Note
In this exercise, you have implemented the minfs_alloc_inode and minfs_destroy_inode functions, but they are not yet called. The correctness of the implementation will be checked at the end of the next exercise.
4. Initialize minfs root inode¶
Initializing the root inode is required in order to mount the file system.
For this, you will need to complete the minfs_ops structure with the minfs_alloc_inode and minfs_destroy_inode functions and fill the minfs_iget function.
The minfs_iget function is the function called to allocate a VFS inode (i.e. struct inode) and fill it with minfs inode-specific information from the disk (i.e. struct minfs_inode).
Follow the directions marked with TODO 4.
Fill out the alloc_inode and destroy_inode fields of struct super_operations structure with the functions implemented in the previous step.
The information about the root inode is found in the second block on the disk (the inode with index 1).
Make minfs_iget read the root minfs inode from the disk (struct minfs_inode) and fill in the VFS inode (struct inode).
In the minfs_fill_super function, replace the myfs_get_inode call with the minfs_iget function call.
Note
To implement the minfs_iget function, follow the implementation of V1_minix_iget.
To read a block, use the sb_bread() function.
Cast the read data (the b_data field of the struct buffer_head structure) to the minfs inode from the disk (struct minfs_inode).
The i_uid, i_gid, i_mode, i_size must be filled in the VFS inode with the values in the minfs inode structure read from disk.
To initialize the i_uid and i_gid fields, use the functions i_uid_write() , and i_gid_write().
Initialize the i_atime , i_ctime, and i_mtime fields of the VFS inode to the value returned by the current_time() function.
You will need to initialize the operations for the inode with type directory. To do this, follow the steps:
- Check if this is a directory type inode using the
S_ISDIRmacro.- For the
i_opandi_fopfields, use kernel functions already implemented:
- for
i_op:simple_dir_inode_operations().- for
i_fop:simple_dir_operations()- Increment the number of links for the directory using the
inc_nlink()function.
5. Testing of minfs mount and unmount¶
Now we can mount the filesystem.
Follow the steps above to compile the kernel module, copy to the virtual machine, start the virtual machine, and then insert the kernel module, create mount point /mnt/minfs/ and mount the file system.
We verify that the file system was mounted by investigating the /proc/mounts file.
We check that everything is fine by listing the mount point contents /mnt/minfs/:
# ls /mnt/minfs/
After mount and verification, unmount the file system and unload the module from the kernel.
Note
Alternatively, to test the entire functionality, you can use the test-minfs.sh script:
# ./test-minfs.sh
The script is copied to the virtual machine when running the make copy command only if is executable.
student@workstation:~/linux/tools/labs$ chmod +x skels/filesystems/minfs/user/test-minfs.sh